  |
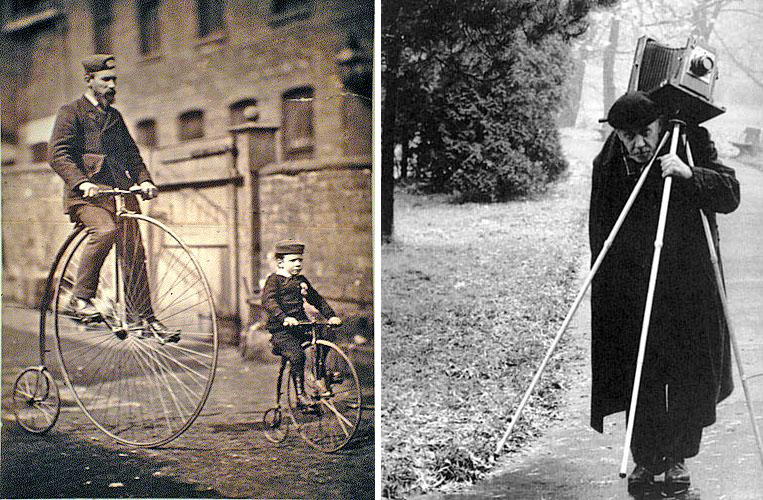
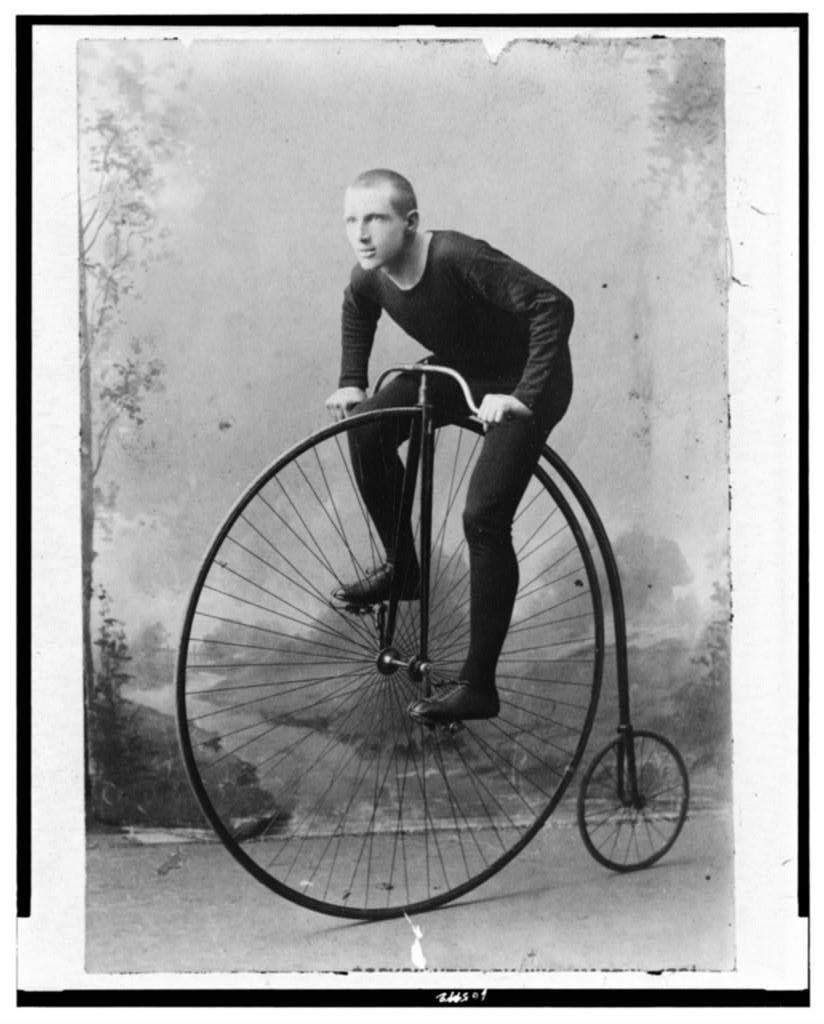
Fortunately the gentlemen at that time still allowed themselves the luxury of coming regularly together, and if opportunity presented itself, one by pastime took a photo of the other’s pastime. But even so we managed to collect only about forty photos on paleocyclists from Michaux’s boneshakers through the tricycles and quadracycles to the penny-farthings, and this number already includes the dwarf version of the tricycle which has stalled in the phylogeny, the children’s tricycle. If you know about any more photos of velocipedists, send them for our collection.



 Velocipede factory in the USA
Velocipede factory in the USA Requiescat in pace
Requiescat in pace



 Come with us to…
Come with us to…
 Atlantis
Atlantis Bestiary
Bestiary Bohemia+Prague
Bohemia+Prague Books, exhibitions, music, film
Books, exhibitions, music, film Caucasus
Caucasus Cemeteries
Cemeteries Crimea
Crimea Get to know the
Get to know the Images of the East
Images of the East Lwów/Lemberg
Lwów/Lemberg Mallorca
Mallorca Message on the wall
Message on the wall The Museum of Propaganda
The Museum of Propaganda Odessa
Odessa Paper Museum
Paper Museum Persian letters
Persian letters The Jewish heritage
The Jewish heritage




















































3 comentarios:
j'adore la bicyclette, je suis impressionnée par la richesse d'informations et de photographies que vous rassemblez et que vous partagez ! merci et bonne journée à vous !
Merci, Dominique. Quelques autres articles sur les bicyclettes suivran, donc revenez bientôt!
Does a bicycle need a rider to be stable? A curious paper entitled "A bicycle can be self-stable without gyroscopic or caster effects" recently appeared in the journal Science. The abtract states "A riderless bicycle can automatically steer itself so as to recover from falls. The common view is that this self-steering is caused by gyroscopic precession of the front wheel, or by the wheel contact trailing like a caster behind the steer axis. We show that neither effect is necessary for self-stability. Using linearized stability calculations as a guide, we built a bicycle with extra counter-rotating wheels (canceling the wheel spin angular momentum) and with its front-wheel ground-contact forward of the steer axis (making the trailing distance negative). When laterally disturbed from rolling straight this bicycle automatically recovers to upright travel. Our results show that various design variables, like the front mass location and the steer axis tilt, contribute to stability in complex interacting ways". The full paper is behind a paywall, but a pre-print may be found here. Some of the bicycles in the post look like they would benefit from "linearized stability calculations".
Publicar un comentario